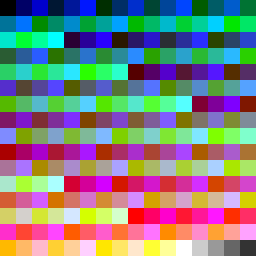
This article describes an optimal palette for 8 bit displays, with a palette of 256 colours. What I mean by "optimal" here, is general optimality, as it is very good for general colour reproduction, and fast, i.e. it is computationally easy and fast to match a given colour to the closest colour in the palette.
It is possible to make marginally better general palettes, but they are very slow to use. It is possible to adapt the palette to the picture, but again, slow, and not general. My palette is practically perfect, and it is easy to find the colours. Without further ado, here it is:
| PNG
|
GIF
|
Red_Bit_0 = Bit_2 XOR Bit_5
Red_Bit_1 = Bit_0
Red_Bit_2 = Bit_1
Green_Bit_0 = Bit_2
Green_Bit_1 = Bit_3
Green_Bit_2 = Bit_4
Blue_Bit_0 = Bit_5
Blue_Bit_1 = Bit_6
Blue_Bit_2 = Bit_7
Sorry, but it is not finished yet. It will be here later. (In 2003, i have still not received any emails about this, so I suppose no one are interested.)
This is accomplished with 2 methods:
By packing the colours as spheres instead of as cubes, the maximum distance between 2 close colours gets lower. (This also means that you must use Floyd Steinberg dithering, since ordered dithering is impossible.)
The colour white on a monitor consists typically of 28% Red, 55% Green, and 17% blue. However, this does not mean that they should have proportionally numbers of colour levels. F.ex. Red should not have half as many levels as Green, even though its level of light is half.
The reason for this, is that the optimal gamma correction is 1.5, from a signal/noise perspective, as shown below. The colours will thus be closer toghether for dark values. (The palette assumes that all colours are represented with gamma of 1.5. If they are not, fix that! Most monitors and screencards already have a gamma of nearly 1.5, so in most cases, do nothing at all!)
Corrected thusly, the relative number of colour levels are: 30% Red, 48% for Green, and 22% for Blue.
NEW(Sep2005:
There are 6 colours for a black to white pure grey-scale as well.
A little warning: The colours Black, White, Red, and Cyan are represented exacly, while the colours Green, Blue, Yellow and Magenta are all each represented by 2 equally close slightly off colours. This means that you have to watch out for overflow if you dither these last 4 pure colours with Floyd Steinberg dithering. This is almost never a significant problem in practice. In other cases, just use the colour that is given by the colour matching program, as they are plenty pure enough for practical purposes.
F.ex: If a sensor registers an average of 100 photons each second, the actual number of photons received in a particular second will be something like 89, 107, or 96. If the receiver only receives for 1 second, the uncertainty will thus be 10%.
In order to maximize the amount of information in a pixel about the level of light, the discrete values should be placed so that the uncertainty of a light level is proportional to the distance between light levels. This is accomplished with a gamma correction of 1.5.
Email me if you want to comment or ask questions: